158-5465-8979
水下机器人的分类和关键技术介绍
一、水下机器人主要分为两大类:遥控操作式和自主式。
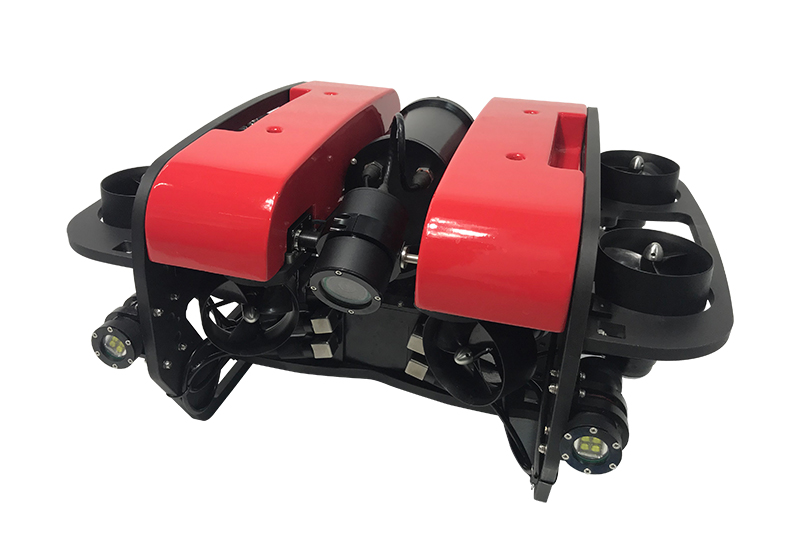
1.遥控操作式水下机器人(ROV):
通过电缆连接地面站或母船,由操作员远程控制。ROV通常配备有摄像头、灯光、机械臂等设备,适用于海底勘查、管道检查、水下打捞等多种任务。由于受到电缆长度的限制,ROV的工作范围相对有限。
2.自主式水下机器人(AUV):
具备自主 导航和决策能力,能够在没有直接人工干预的情况下执行预定任务。AUV携带的能量和存储空间有限,因此在设计上更加注重能效和续航能力。AUV广泛应用于海洋环境监测、地质调查、海洋生物研究等领域。
二、关键技术
1.导航与定位系统:水下机器人需要导航与定位技术来确定自身位置和运动方向。常用的定位方法包括声学定位、惯性导航系统(INS)、全球定位系统(GPS)等。
2.传感器技术:为了收集各种环境数据,水下机器人配备了多种类型的传感器,如温度传感器、压力传感器、水质分析仪、声呐等。这些传感器的数据对于科学研究和资源勘探至关重要。
3.通信技术:水下通信面临诸多挑战,如信号衰减严重、传输速率低等。因此,开发高 效可靠的水下通信技术是提高水下机器人作业效率的关键。
4.能源管理系统:对于自主式水下机器人而言,合理的能源管理策略可以延长其工作时间和作业范围。目前,常见的能源管理技术包括能量优化算法、太阳能充电等。
最新文章


水下机器人的关键技术和应用领域
水下机器人,也称为水下无人潜航器,是一种能够在水下自主或遥控操作的智能装置。随着海洋资源开发、环境保护、科学研究等领域的快速发展,水下机器人技术得到了广泛应用,成为探索和利用海洋资源的重要工具。

埃及客户定制双云台监控系统
埃及客户定制的云台监控系统,防水深度300米,自带图像增强功能,双自由度云台,视角大,可靠性高。亮度可多级调节,适应不同水下场景对光照强度的要求。

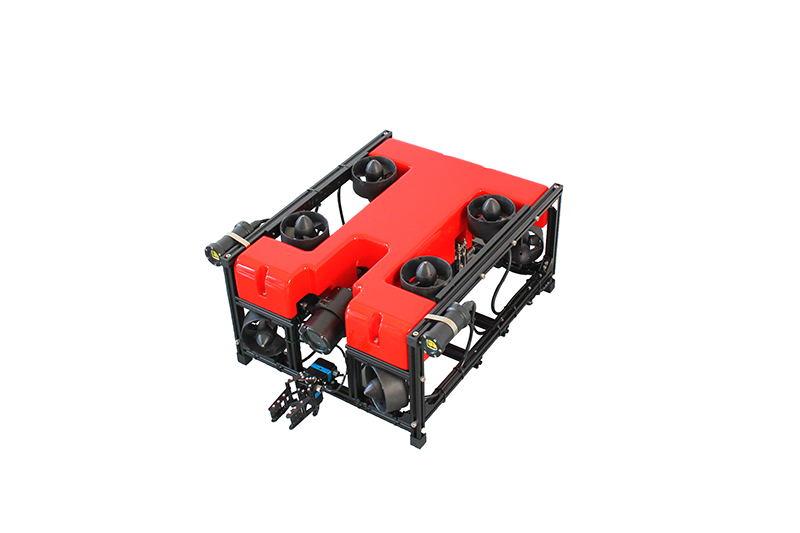
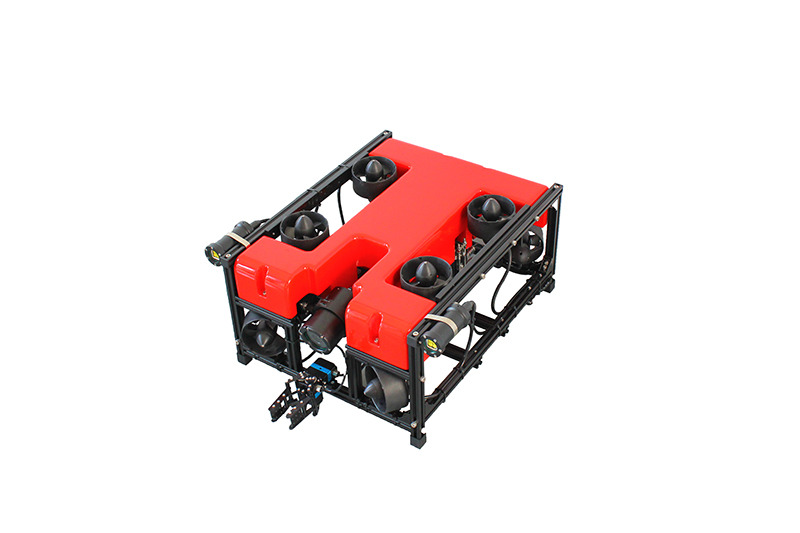
六推水下机器人在客户现场实拍
六推水下机器人在客户现场实拍视频,17寸高亮LED 3屏折叠屏,高效率岸基直流高压供电,1080P高清网络浑水成像云台摄像机,自带浅水绿光抑制算法和水下自动透雾功能,在浑水中有比同类产品更出色的拍摄效果。



USRR6T-AJ水下机器人在马来西亚工程现场应用


水下摄像的特点介绍
水下摄像是在水下进行的摄影和电视录像活动,它能够真实地反映水下景象,如水生动植物的生活、海底和河床的地质资料、考古发现等,在科研、军事技术、体育、教学等方面应用较广。



contact us
李经理:158-5465-8979
王经理:132-8780-6732
地址:山东威海火炬高技术产业开发区田和街道世昌大道307-2号
本站部分内容来源于网络,如果您认为我们侵犯了您的版权请告知,我们将立即删除
备案号:鲁ICP备2024116257号-1